안녕하세요 역학맨입니다.
이번에는 로봇공학을 공부하기위해 자주 나오는 용어들과 의미들을 한번 정리해보는 시간을 가져보도록 하겠습니다.
용어 정리
- 기계공학에서의 운동
- 병진운동 : 물체의 중심점과 물체가 함께 움직이는 운동 (물체의 변위만 변하고 회전은 없음)
- 회전운동 : 물체가 어떤 중심점을 기준으로 회전하는 운동 (물체의 변위도 변하고 회전도 있음)
기계공학에서 운동은 두 개로 나뉘는데 병진운동과 회전운동입니다. 말로 풀어쓰려면 이해하기가 쉽지 않으니 예시 그림을 보여드릴게요.


로보틱스에 있어서 이러한 운동을 만들어내기위해 뼈대에 해당하는 링크(Link)와 관절에 해당하는 조인트(Joint)를 사용하게 됩니다.
링크와 조인트

직동관절(Prismatic, P)은 피스톤의 움직임처럼 앞뒤로 왕복하는 운동을 하며 회전관절(Revolute, R)은 두 개의 링크를 회전할 수 있게끔 만들어주는 역할을 합니다. 이외에도 다양한 조인트의 종류를 통해 다양한 움직임을 만들어낼 수 있습니다. 또한 저는 앞으로 Joint variable을 d로 사용하도록 하겠습니다.
매니퓰레이터(Manipulator)

매니퓰레이터(Manipulator)란, 링크와 조인트로 이루어진 직렬 기계장치입니다. 이를 설명하기위해서 DOF(Degrees of Freedom)이라는 자유도를 알아야하는데 DOF란 어떤 물체의 상태나 위치를 표현하기위해 필요한 독립적인 변수들의 갯수라고 생각하면 좋을 것 같습니다. 예를 들어 3DOF라고 하면 아래의 그림과 같이 점의 움직임, 즉 위치를 3개의 좌표로 나타낼 수 있습니다. 보통 산업용 매니퓰레이터의 경우 6DOF를 가지는 데 그러한 이유는 무엇일까요?


매니퓰레이터의 경우 위치(Position)뿐만 아니라 방위(Orientation)을 함께 고려해야하기 때문입니다. 방위는 회전운동을 말하며 피칭(pitch), 요잉(yaw), 롤링(roll)의 세 가지 운동이 있습니다. 이해를 쉽게 하기위해 우리의 손목을 회전시키는 동작이 바로 피칭, 요잉, 롤링입니다. 매니퓰레이터의 Arm이 위치를 담당하고 Wrist에서 방위를 담당하게 됩니다.
Flange라고 불리는 부분은 사용목적에 맞는 End-effector를 장착할 수 있는 부분입니다. 이 부분을 기준으로 Working space가 형성되는 데 매니퓰레이터의 작업반경으로 안전과 관련하여 상당히 중요한 요소이므로 잘 알아두어야합니다.
Payload, 가반하중이라고 하며 로봇이 다른 속성을 유지할 수 있는 상황에서 운송이 가능한 무게를 의미하게 되며 산업현장에서 실질적으로 자주 맞이하게 되는 단어로 알아두어야합니다. 이는 로봇의 최대 적재하중보다는 훨씬 작은 무게를 가지게 되는데 이는 최대 적재하중으로 운용할 시 에는 작업효율과 정밀도가 줄어들기 때문에 가반하중을 훨씬 작게 설정하게 된다.
Direct teaching, 직접교시 무거운 매니퓰레이터를 사람이 직접 움직여 작업할 수 있도록 하는 것을 의미합니다. 매니퓰레이터의 모든 관절에 힘센서를 사용하여 외력이 가해졌을 때 외력에 반대로 Torque가 발생할 수 있도록 모터를 제어하여 Safety를 개선할 수 있습니다.

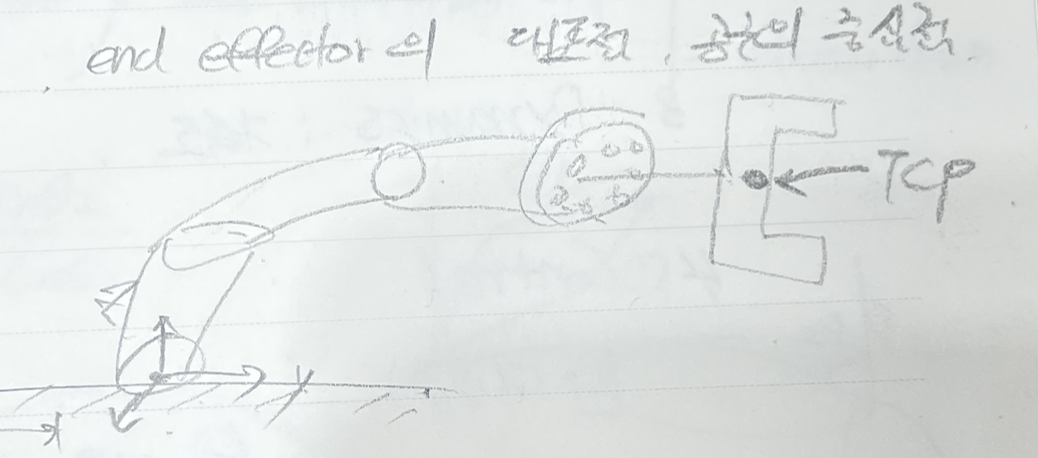
Tool Center Point, 공구중심점(TCP)
로봇이 자신의 위치를 파악하기위해서는 다양한 중심점이 필요하게 되는데 그 중에서 End-effector의 대표점을 의미합니다. 하지만 로봇마다 중심이 모두 다르기 때문에 정확한 중심은 아니므로 대략적인 중심을 채택하여 사용하게 됩니다.
매니퓰레이터의 종류

- Cartesian의 경우 회전없이 오로지 Prismatic(직동관절)로 이루어진 로봇을 의미하며 PPP로 나타낼 수 있다. (P=Prismatic, R= Revolute로 표현할 것이다)
- Cylindrical, 1개의 회전관절, 2개의 직동관절이 존재하는 형태로 RPP
- Spherical, 2개의 회전관절, 1개의 직동관절, RRP
- Articulated, 3개의 회전관절, RRR / 대부분의 산업용 로봇의 형태이며 6DOF를 지니고 있다.
이외에도 다양한 용어가 있지만 그에 대해서는 나오는 대로 간단하게 설명하는 것으로 하고 이번 포스팅을 여기까지 하도록 하겠습니다. DOF와 같은 중요한 용어에 대해서는 따로 페이지를 만들어 자세하게 설명하는 시간도 가져보도록 하겠습니다.
그럼 다음 포스팅에서는 본격적으로 수학적으로 로보틱스를 어떻게 이해해야하는지 설명해보도록 하겠습니다. 감사합니다.

'기계공학 > 로보틱스' 카테고리의 다른 글
| 모션플래닝 기초 개념 정리 - MotionPlanning_Review (PRM, RRT) (0) | 2025.03.26 |
|---|---|
| <논문리뷰> A review of visual SLAM methods for autonomous driving vehicles (0) | 2025.03.14 |
| 로보틱스 Ch2. 좌표변환 / Robotics Ch2. Transform Matrix (1) | 2025.03.11 |
| 로봇공학, 로보틱스(Robotics) 공부하기 (1) - 로봇에 대한 기초, 구성요소 (0) | 2025.01.31 |